郑州科步科技有限公司的KB3.0微型履带蜘蛛起重机具有整机柔性好、操纵方便、结构紧凑、作业轻便灵活、性能稳定、使用可靠、维修方便等优点。蜘蛛吊车主要用于大型工程机械无法进入的变电站的电器设备的拆卸、维修、安装等,代替以前人拉肩扛的人力手工作业,实现安全文明生产,提高生产劳动效率,降低安全隐患发生的概率。今天给大家分享蜘蛛吊车伸出支腿的操作指南。
确认起重机停稳,同时吊臂处于复位状态,否则设备禁止进行支腿的操纵。
手动模式下,将吊臂/行走/支腿三档切换拨钮切换至“支腿”档位,方可进行支腿的手动操作:
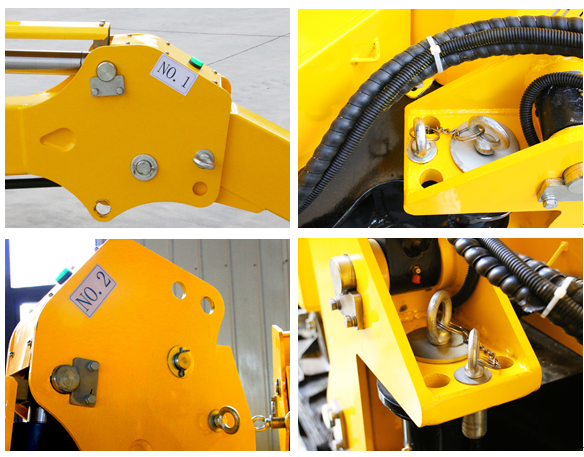
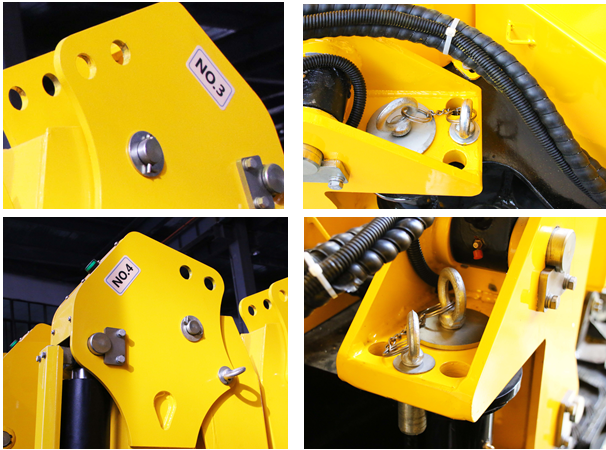
①支腿升降由支腿操作手柄操控,通过手柄杆的的拨动来控制支腿的升降。(见下图支腿操纵杆,1、2、3、4与NO.1、NO.2、 NO.3、NO.4相对应。)


②手动,将靠近机身的内侧销子1拔出,将支腿旋转调整到最合适的角度,然后用销子1将支腿关节与车体固定,同样的办法打开并固定其他三个支腿。(见下图:最大角度指示图)
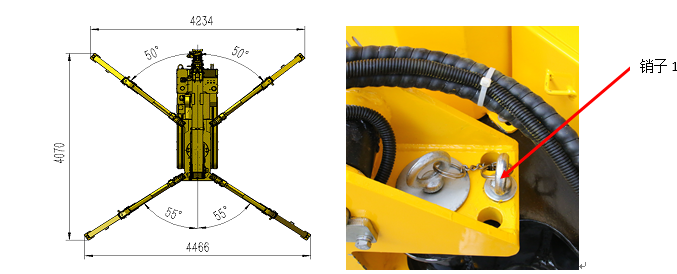
支腿最大位置示意图:
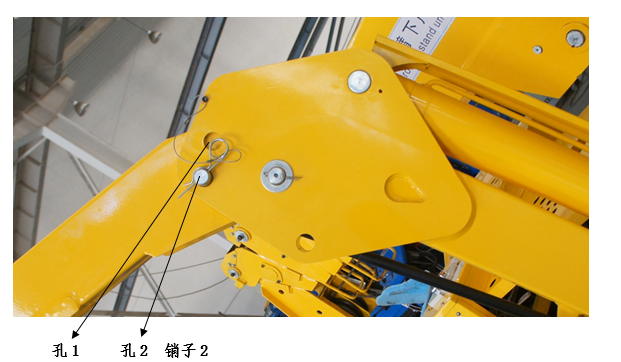
③手动,拔出销子2,选择合适位置,将主腿、杆腿用销子2固定。在没有障碍物的情况下,一般选择此最大角度(支腿固定销子2安装在孔1处)。
④调整支腿调节操纵杆,慢慢伸展支腿,直到确认支腿已经完全与地面接触并牢固固定机身,必须根据水平仪调节机身水平。各个支腿的角度要保持一致。

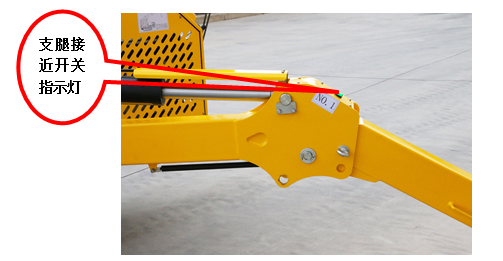
⑤支腿撑好后,(支腿完全接地后,支腿上安装的接近开关指示灯变为绿色;如若哪个支腿上的指示灯未亮,即相对应的支腿接地未接好)。支腿支地过程中,必须根据起重机上安装的水平仪调节机身,保证机身处于水平状态。
注意:支腿不要接触到建筑物等不稳定的地方。先伸1、4支腿,后伸 2、3支腿。确认水平仪水平,机器保持平衡。地面与履带的距离10厘米最合适。在作业之前,确保四个支腿平稳,各个销钉插好后,再进行吊重作业。
遥控模式,设备支腿可通过遥控器来进行远距离的无线遥控,当选择遥控操控时,需确保设备操作面板上的遥控器旋钮位于“开”档位,无线遥控器连接正常,然后将无线遥控器上的吊臂/行走/支腿三档切换拨钮切换至“支腿”档位,方可通过遥控器上的支腿控制摇杆控制支腿动作,无线遥控器上的四个支腿控制摇杆与设备四条支腿一一对应。遥控模式下,严禁操纵设备上阀组手柄杆进行手动操作。
以上就是蜘蛛吊车机器伸出支腿的操作流程。



