郑州科步科技有限公司的KB3.0微型履带蜘蛛起重机具有整机柔性好、操纵方便、结构紧凑、作业轻便灵活、性能稳定、使用可靠、维修方便等优点。蜘蛛吊车主要用于大型工程机械无法进入的变电站的电器设备的拆卸、维修、安装等,代替以前人拉肩扛的人力手工作业,实现安全文明生产,提高生产劳动效率,降低安全隐患发生的概率。接下来给大家分享蜘蛛吊车机器启动及行走的操作指南。



首先确认液压油注入油量不少于液位液温计表容积的3/5后,发动机器。
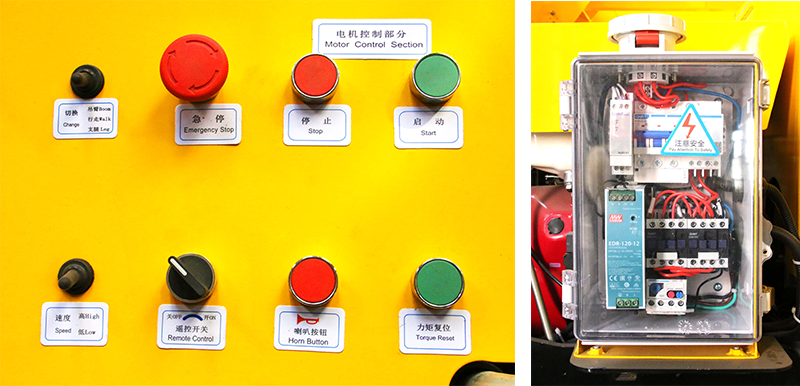
启动设备
设备启动前,请确认钥匙开关处于在中间位置(参考标示图),并确认行车方向没有人或其他障碍物。
设备配备两套动力系统,即发动机系统与电机系统,均可实现设备的操作。
动力系统:
钥匙开关共有四个位置。正常停机状态处于停止位置;当进入冬季,若发动机启动困难,钥匙开关左旋到“预热”,预热10-15秒钟,发动机更容易启动;钥匙开关右旋到“接通”位置,等几秒钟,机器检查电气系统(故障指示)完毕,方可启动。若连续启动(中间间隔半分钟以上)3到4次,还不能启动,请检查是否有故障。

电机系统:
如需转换成电机功能,工业插座处连上单相380V 50Hz工业电源,空气开关按至ON状态再按下电机启动按钮,钥匙开关切换至接通档位,即可开始正常操作。使用电机吊装完毕按下停止按钮,关闭钥匙开关(防止电池耗电亏空)。操作过程中如遇到紧急问题可按下急停按钮,排除问题后右旋急停按钮(解除急停状态),按下绿色启动按钮,重新启动恢复作业。
起重机行走之前,必须把四个支腿收起放稳,销钉插好,同时吊臂处于复位状态,否则设备禁止行走。起重机操纵有遥控/手动两种模式,操纵起重机前需确定起重机的操纵模式。手动作业时,确保遥控器拨钮位于“关”档位之后,将设备操作面板上的吊臂/行走/支腿三档切换拨钮切换至对应档位,方可进行起重机的手动作业。遥控模式作业时,确保遥控器旋钮位于“开”档位之后,无线遥控器打开并连接正常(可通过无线遥控器上的喇叭按钮确认是否连接成功),方可通过无线遥控器进行设备的遥控作业,且遥控模式下,严禁操纵起重机上手动操纵方式。
起重机在吊载状态下禁止行走。
手动模式,遥控器拨钮位于“关”档位,设备操作面板上的吊臂/行走/支腿三档切换拨钮切换至“行走”档位。通过控制行走阀两手柄杆来实现设备的行走移动,设备在行走过程中,尽量确保在路面平坦、视野开阔的通道上匀速行走。同时该设备具有行走双速,可通过高低速度切换拨钮中的高、低速档位的选择来实现行走的高、低速切换。

遥控模式,设备行走功能可通过遥控器来进行远距离的无线遥控,当选择遥控操控时,需确保遥控器拨钮位于“开”档位,无线遥控器连接正常后,方可通过无线遥控器进行遥控作业。将无线遥控器上的吊臂/行走/支腿三档切换拨钮切换至“行走”档位,然后通过左、右行走控制摇杆实现设备的行走功能,通过可通过无线遥控器上的高低速切换拨钮选择行走速度的高低。
遥控模式下操控设备时,严禁操纵设备上行走阀的手柄杆进行手动操作。

设备前进或后退
行走阀左右两个操作手柄杆同时向上侧推动,可实现设备的前进;两个操作手柄杆同时向下推动,则设备后退。
设备转向
行走阀两行走操作手柄一停一拉动可实现设备的转向动作。左侧手柄向上推到前进挡,右侧手柄处于停机档位,则设备为右转;左侧手柄处于停机档位,右侧手柄处于前进档位,则设备为左转。
设备停止移动
两行走操作手柄拉至中位停机档位时,设备停止移动。

以上就是蜘蛛吊车机器启动及行走的操作流程。
科步公司提醒您:详细了解蜘蛛吊车操作,可以减少机器损耗,提高工作效率。科步公司以多年的蜘蛛吊车生产经验为支撑,不断提升生产工艺,精益求精,保证为客户提供更优质的产品和服务。欢迎新老客户前来咨询!



